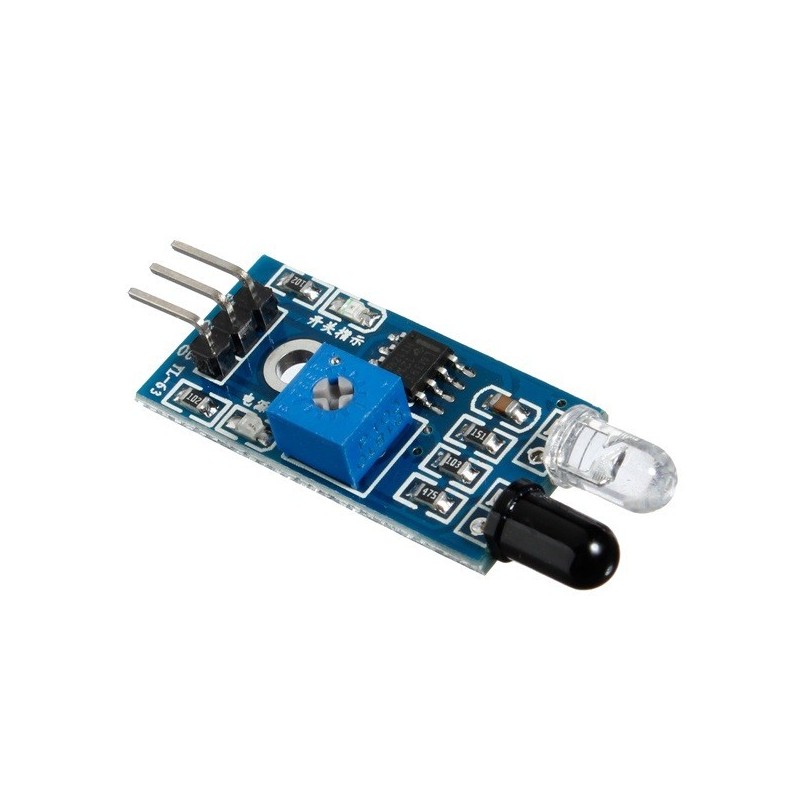
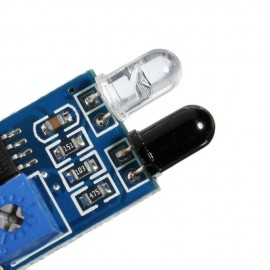
O Sensor IR Infravermelho é um circuito composto por um emissor e um receptor IR, mais o CI comparador LM393, que facilita sua conexão com Arduino, PIC ou Raspberry Pi, visto que sua tensão é de 3,3-5V.
O seu funcionamento é simples: quando algum obstáculo refletor (cor branca) é colocado à frente do Sensor IR Infravermelho, o sinal infravermelho é refletido para o receptor. Quando isso acontece, o pino de saída OUT é colocado em nível baixo (0), e o led verde do módulo é aceso, indicando que algum obstáculo foi detectado.
Se a superficie do obstáculo for de cor preta, a radiação infravermelha não é refletida. Isto permite que o sensor reconheça linhas pretas em fundo branco (e vice-versa) permitindo ao seu robôt seguir essa linha.
O alcance do sensor é de 2 a 80 cm, que pode ser ajustado por um potenciómetro na placa. O Sensor IR Infravermelho ou de obstáculo é um ótimo componente para utilização em robôs, contadores, alarmes e outros projetos com o Arduino.
Especificações:
• Sensor de obstáculo IR;
• Tensão de operação: 3.3 à 5V DC;
• Emissor e receptor IR;
• Distância de detecção: 2 à 80 cm;
• Potenciómetro para ajuste da distância;
• Dimensões: 37 x 14 x 6 mm.
Esquema de Ligação:

Código Exemplo:
// IR Obstacle Collision Detection Module
int LED = 13; // Use the onboard Uno LED
int isObstaclePin = 7; // This is our input pin
int isObstacle = HIGH; // HIGH MEANS NO OBSTACLE
void setup() {
pinMode(LED, OUTPUT);
pinMode(isObstaclePin, INPUT);
Serial.begin(9600);
}
void loop() {
isObstacle = digitalRead(isObstaclePin);
if (isObstacle == LOW)
{
Serial.println("OBSTACLE!!, OBSTACLE!!");
digitalWrite(LED, HIGH);
}
else
{
Serial.println("clear");
digitalWrite(LED, LOW);
}
delay(200);
}
Inclui:
• 1x Sensor de Obstáculo Infravermelho IR.