The latest news item has a youtube clip which shows a plot of the flight:
Click to view attachment
Assuming that y is N-S and x is E-W, it shows the main S component of the flight but also about a 22m component to the E or W. On the other hand, x returns to close to 0m but the ZCAM image shows that it landed about 10m East of the starting position. Perhaps the internal position tracking drifted during the long flight, in E-W direction only.
If positive x means to S, and negative z up, then positive y would mean to W, I think, in a regular right-handed system. Staring at the Hazcam picture I thought maybe Ingenuity is to the E, closer to the rover not that it is really possible to tell.
I went ahead and sketched out W and E options for a possible flight path in this map:
Click to view attachment
What is interesting that adding a sight line to Ingenuity on the Hazcam image using the hill in the background (long arrow), leads to an intersection really only with the E option. So the circled area is a possible location for Ingenuity on the Hazcam image. It would mean it was close to its destination at 12:34:13. Presumably we will soon know when more images from the flight are released.
Full Version: Ingenuity- Mars 2020 Helicopter
Great news!. The helicopter has been a total success.
It would be good if, after the 4 successful flights and the extension of the mission, they enabled a new category in the RAW images section or on the "Mars Helicopter" website with the images made by the helicopter during the first four flights.
According to the plans that they had and that they have been publishing for flights three and four, I suppose they will have many images that have not yet been published.
It would be good if, after the 4 successful flights and the extension of the mission, they enabled a new category in the RAW images section or on the "Mars Helicopter" website with the images made by the helicopter during the first four flights.
According to the plans that they had and that they have been publishing for flights three and four, I suppose they will have many images that have not yet been published.
Video of Ingenuity 4th flight in approximately real time:

Speed x2 and squeezing of the period when Ingenuity is not in the field of view:

Speed x2 and squeezing of the period when Ingenuity is not in the field of view:
Here timestamped animations for flight FOUR using the right ZCAM sequence, clipped to the in-frame action (click for mp4):

lossless webp:
http://bit.ly/Flight4Lossless
workflow:
roverpics -> wget -i -> rename for use in labeling: for a in *png; do cp -n $a labels/`echo $a |
sed 's/Z.*_0069_//' | sed 's/ECV.*/\.png/' | sed 's/_/\./'`; done
determine average ms per frame: ls | sed 's/.png//' | awk '{print $1 - prev; prev = $1}' | awk '$1 < 0.2 {sum += $1; i += 1; print sum/i}'
select frames
label with imagemagick: convert selection/*.png -enhance -gravity South -annotate +0+10 '%t(s)' -gravity SouthEast -annotate +10+10 'Attributions' allFrames.tiff
convert to mp4: convert -delay 144x1000 allFrames.tiff -quality 100 animation.mp4
convert to webp with gimp
lossless webp:
http://bit.ly/Flight4Lossless
workflow:
roverpics -> wget -i -> rename for use in labeling: for a in *png; do cp -n $a labels/`echo $a |
sed 's/Z.*_0069_//' | sed 's/ECV.*/\.png/' | sed 's/_/\./'`; done
determine average ms per frame: ls | sed 's/.png//' | awk '{print $1 - prev; prev = $1}' | awk '$1 < 0.2 {sum += $1; i += 1; print sum/i}'
select frames
label with imagemagick: convert selection/*.png -enhance -gravity South -annotate +0+10 '%t(s)' -gravity SouthEast -annotate +10+10 'Attributions' allFrames.tiff
convert to mp4: convert -delay 144x1000 allFrames.tiff -quality 100 animation.mp4
convert to webp with gimp
Since the left ZCAM camera captured lift-off and landing, I combined it with the right camera using the timestamps:

lossless webp: http://bit.ly/Flight4LosslessLeftRight (large, will play at proper speed the second time)
One could transition between the cameras more smoothly, or combined left and right frames for a wider view, with a lot of work (>500 frames).
lossless webp: http://bit.ly/Flight4LosslessLeftRight (large, will play at proper speed the second time)
One could transition between the cameras more smoothly, or combined left and right frames for a wider view, with a lot of work (>500 frames).
Contrast stretching and speeding up reveals how Ingenuity kicks up dust on lift off and particularly on the return trip where she descends through her own dust cloud and disturbs it during landing.

There appears to be a southerly breeze (blowing to the north).
There appears to be a southerly breeze (blowing to the north).
QUOTE (Andreas Plesch @ May 2 2021, 01:51 PM) 
Contrast stretching and speeding up reveals how Ingenuity kicks up dust on lift off and particularly on the return trip where she descends through her own dust cloud and disturbs it during landing.
Thanks Andreas. This is a great set of images from both cameras that really contextualizes the majority of the flight.
Whatever dust is kicked up is ephemeral. You can't even detect it without significantly boosting the signal in the images. The nadir-pointing camera on Ingenuity shows very little dust also, so far.
One thing to think about in regards to dust kicked up by Ingenuity is that the takeoff site I believe was a bit scoured of dust by Perseverance's landing so, even though the rotors are much closer to the surface there, there's little dust to kick up. It makes complete sense to me that mid flight you may see more dusting effects even from higher altitude.
A recently posted, right MCZ image sequence for sol 74, 15:19:38 to 15:19:53, looking at a portion of the flight path of flight FOUR, shows no activity for that time (click for mp4):

(auto white balanced)
Unlikely that the video was planned for another flight attempt since nothing was announced. Perhaps a preparatory test recording, since in parallel the left ZCAM recorded a wide field of view, with some processing issues.
auto white balance:
gimp: color - levels - auto input: note input levels for each channel, convert to percent
convert: convert 0673520*.png -fill gray90 -gravity South -annotate +0+10 '%t(s)' -gravity SouthEast -annotate +10+10 'NASA Mars2020/JPL, converter' -channel R -level 9%,99.6% -channel G -level 4.3%,94.1% -channel B -level 0%,77.6% allFramesC.tiff
(auto white balanced)
Unlikely that the video was planned for another flight attempt since nothing was announced. Perhaps a preparatory test recording, since in parallel the left ZCAM recorded a wide field of view, with some processing issues.
auto white balance:
gimp: color - levels - auto input: note input levels for each channel, convert to percent
convert: convert 0673520*.png -fill gray90 -gravity South -annotate +0+10 '%t(s)' -gravity SouthEast -annotate +10+10 'NASA Mars2020/JPL, converter' -channel R -level 9%,99.6% -channel G -level 4.3%,94.1% -channel B -level 0%,77.6% allFramesC.tiff
Details of flight 5 announced LINK
From the update article that PaulH51 linked to above:
QUOTE
[O]n the fourth flight, we actually scouted for a landing zone over 100 meters (328 feet) away. The digital elevation maps put together by the Ingenuity team gave us confidence that our new airfield is flat as a pancake a good thing when you have to land on it.
***
Our helicopter is even more robust than we had hoped. The power system that we fretted over for years is providing more than enough energy to keep our heaters going at night and to fly during the day. The off-the-shelf components for our guidance and navigation systems are also doing great, as is our rotor system. You name it, and its doing just fine or better.
***
Our helicopter is even more robust than we had hoped. The power system that we fretted over for years is providing more than enough energy to keep our heaters going at night and to fly during the day. The off-the-shelf components for our guidance and navigation systems are also doing great, as is our rotor system. You name it, and its doing just fine or better.
QUOTE (rlorenz @ Mar 28 2021, 10:13 AM)
Helicopters do not scale up well.
Beyond the obvious thrust challenge in the thin Martian atmosphere (i.e. classic momentum theory, and the Mach/Reynolds aerodynamic issues common to all aeronautics), there are some other rotorcraft-specific issues that actually are rather challenging for Ingenuity that one only confronts when one gets into the real details of design and test.
First is heat transfer. The thin atmosphere gives almost no cooling. The Ingenuity motors have parts made of beryllium to act as a heatsink, but even then I think overheating is actually the limiting factor on flight duration, not battery energy.
Second is aeroelasticity. There's a similarity parameter called the Lock Number (that I hadn't heard of until I started working with rotor people on Dragonfly) that is important in assessing the structural damping of blade flexing. Again, the thin atmosphere is the problem, it provides no damping so blade oscillations can build up.
Both of these issues get worse as you scale up. So at the NIAC / Powerpoint / student-final-year-project level, yes you can mock out neat-looking hexacopters and stuff in the 10-20 kg range and they look like they should fly, but once you really start poking into the thermal and mechanical design, I bet even those would not work out.
Beyond the obvious thrust challenge in the thin Martian atmosphere (i.e. classic momentum theory, and the Mach/Reynolds aerodynamic issues common to all aeronautics), there are some other rotorcraft-specific issues that actually are rather challenging for Ingenuity that one only confronts when one gets into the real details of design and test.
First is heat transfer. The thin atmosphere gives almost no cooling. The Ingenuity motors have parts made of beryllium to act as a heatsink, but even then I think overheating is actually the limiting factor on flight duration, not battery energy.
Second is aeroelasticity. There's a similarity parameter called the Lock Number (that I hadn't heard of until I started working with rotor people on Dragonfly) that is important in assessing the structural damping of blade flexing. Again, the thin atmosphere is the problem, it provides no damping so blade oscillations can build up.
Both of these issues get worse as you scale up. So at the NIAC / Powerpoint / student-final-year-project level, yes you can mock out neat-looking hexacopters and stuff in the 10-20 kg range and they look like they should fly, but once you really start poking into the thermal and mechanical design, I bet even those would not work out.
At the April 30 press conference, https://www.youtube.com/watch?v=BAlXe-U0ws4 at about the 78 minute mark, J (Bob) Balaram, Ingenuity chief engineer, made a couple of comments that speak to one of the issues raised by Ralph in the fascinating quoted post and several followups.
First, Balaram confirmed that vehicle heating rather than power availability was the factor constraining flight duration. Second, he noted that "[s]ince we were a technology demonstration designed for short flights, all the waste heat in the motor actually gets absorbed in the motor, and the motor temperature raises by about one centigrade for every second of operation." For what it's worth, and yes, it's just an offhand remark at a press conference for a general audience, I hear that as not ruling out the existence of techniques that might permit the next generation of Mars helicopters to shed enough waste heat to allow longer flights.
Incidentally, does anyone know the eponym of Lock's Number (also called Lock's Constant)? I've traced the following citation, Lock, C., Application of Goldsteins Airscrew Theory to Design, Aeronautical Research Committee, RM 1377, Nov. 1930, but haven't found any biographical information for "C. Lock."
QUOTE (PaulH51 @ May 6 2021, 05:54 PM)
Details of flight 5 announced LINK
Based on preliminary mapping of dunes and rocks, I believe the highlighted area in this flight 4, aerial image was the destination for flight 4, and could be the targeted landing area for flight 5:
Click to view attachment
Microphone on SuperCam worked!
https://www.youtube.com/watch?v=y5niGi4k9vQ
https://www.youtube.com/watch?v=y5niGi4k9vQ
QUOTE (Tom Tamlyn @ May 6 2021, 09:32 PM)
Incidentally, does anyone know the eponym of Lock's Number (also called Lock's Constant)? I've traced the following citation, Lock, C., Application of Goldsteins Airscrew Theory to Design, Aeronautical Research Committee, RM 1377, Nov. 1930, but haven't found any biographical information for "C. Lock."
Finding this information was extraordinarily difficult, and I think underlines the importance of not omitting material when writing because "everybody who cares already knows what this means". Here we are a hundred years later, and nobody living remembers what this meant. I think the man's name was Christopher Noel Hunter Lock, based on this link: https://www.google.com/books/edition/The_Wa...=1&pg=PA121
I found some biographical notes in this study of the Lock family history:
QUOTE
Thursday 13 March 1924, page 17: forthcoming marriages: MR. C. N. H. LOCK AND MISS GILLMAN. The marriage of Christopher Lock, Fellow of Gonville and Caius College, Cambridge, son of the late Rev. J. B. Lock, Fellow of Gonville and Caius College, and Mrs. Lock, with Lilian, daughter of Mr. A. W. Gillman, O.B.E., and Mrs. Gillman, of Streatham, will take place at the end of April.
QUOTE
Tuesday 29 March 1949, page 1: deaths: LOCK.On March 27, 1949, suddenly, at 49, Park Road, Hampton Hill, Middlesex, CHRISTOPHER NOEL HUNTER LOCK, M.A., of the National Physical Laboratory, Teddington, aged 54.
Flight FIVE has landed ok, judging from this ZCAM image:
https://mars.nasa.gov/mars2020/multimedia/r...AM05061_110085J
taken about an hour after touchdown at 13:32
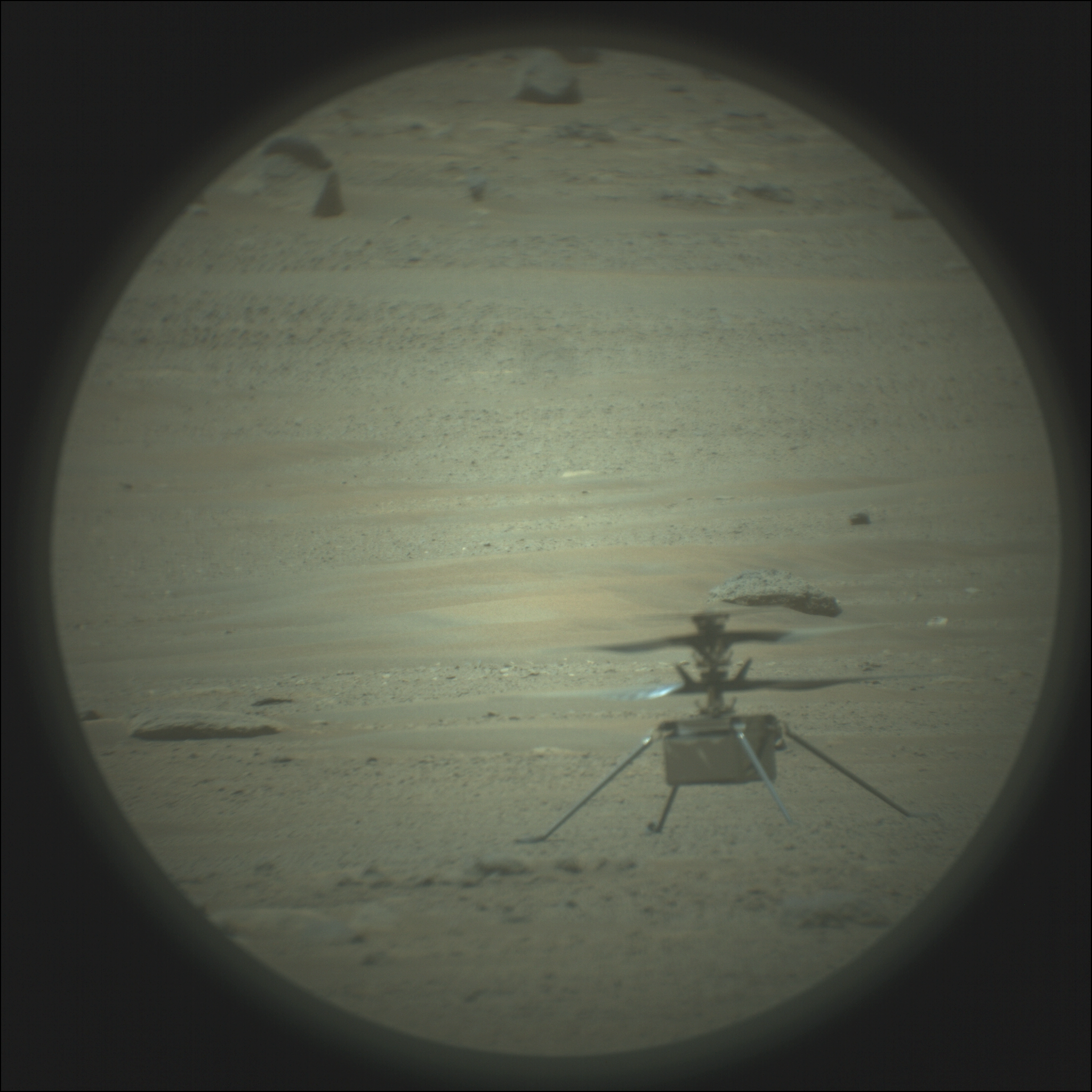
Still in the air 12:34 :
https://mars.nasa.gov/mars2020/multimedia/r...AM00297_00_0LLJ
Judging from the vertical position relative to the background (horizon), the helicopter appears higher above ground than the 5m in previous flights, probably during the final phase for which it was planned to reach 10m to shoot better aerial imagery.
https://mars.nasa.gov/mars2020/multimedia/r...AM05061_110085J
taken about an hour after touchdown at 13:32
Still in the air 12:34 :
https://mars.nasa.gov/mars2020/multimedia/r...AM00297_00_0LLJ
Judging from the vertical position relative to the background (horizon), the helicopter appears higher above ground than the 5m in previous flights, probably during the final phase for which it was planned to reach 10m to shoot better aerial imagery.
Inflight anaglyph, navcam sol 76

QUOTE (Explorer1 @ May 7 2021, 09:50 AM)
Microphone on SuperCam worked!
https://www.youtube.com/watch?v=y5niGi4k9vQ
https://www.youtube.com/watch?v=y5niGi4k9vQ
The released audio is cleaned up a bit to take out some ZCAM electromagnetic noise, and the acoustic/vibration signal of the MMRTG pump, but even in the raw audio the heli is quite distinctly audible. This was a pleasant surprise to us last weekend, as the distance to the heli was some 100m or so, and some models of the acoustic absorption of CO2 suggested we wouldnt be able to detect anything.
Ralph
The right navigation camera images from still in the air and after landing superimposed. They register very well:
Click to view attachment
The position of the helicopter while still in the air is almost exactly above the landing location.
in the air:
attitude: "(0.206511,-0.0122821,0.019303,0.978177)",
camera: {
filter_name: "UNK",
camera_vector: "(0.46431843108674914,0.8760026576080538,-0.13049037672091557)",
camera_position: "(0.677432,0.768467,-1.98032)",
on the ground:
attitude: "(0.206511,-0.0122821,0.019303,0.978177)",
camera: {
camera_vector: "(0.46795282267796867,0.8831116046021793,-0.033675652401784634)",
camera_position: "(0.677432,0.768467,-1.98032)",
},
Click to view attachment
The position of the helicopter while still in the air is almost exactly above the landing location.
in the air:
attitude: "(0.206511,-0.0122821,0.019303,0.978177)",
camera: {
filter_name: "UNK",
camera_vector: "(0.46431843108674914,0.8760026576080538,-0.13049037672091557)",
camera_position: "(0.677432,0.768467,-1.98032)",
on the ground:
attitude: "(0.206511,-0.0122821,0.019303,0.978177)",
camera: {
camera_vector: "(0.46795282267796867,0.8831116046021793,-0.033675652401784634)",
camera_position: "(0.677432,0.768467,-1.98032)",
},
A right MZC frame sequence of the final phase of flight 5 became available. It shows approach, ascent, hover, descent and landing. It is almost a complete sequence but for about 2.5s missing from hovering between 12:34:47 and 12:34:49.
Here is a timestamped, cropped, reduced and white-balanced gif:

click for larger mp4.
And the original frames as lossless webp:
http://bit.ly/Flight5Lossless
Here is a timestamped, cropped, reduced and white-balanced gif:
click for larger mp4.
And the original frames as lossless webp:
http://bit.ly/Flight5Lossless
QUOTE (Andreas Plesch @ May 8 2021, 03:59 PM)
A right MZC frame sequence of the final phase of flight 5 became available. It shows approach, ascent, hover, descent and landing. It is almost a complete sequence but for about 2.5s missing from hovering between 12:34:47 and 12:34:49.
Here is a timestamped, cropped, reduced and white-balanced gif:
click for larger mp4.
And the original frames as lossless webp:
http://bit.ly/Flight5Lossless
Here is a timestamped, cropped, reduced and white-balanced gif:
click for larger mp4.
And the original frames as lossless webp:
http://bit.ly/Flight5Lossless
Andreas, thank you for your movie. I see a dust devil near the end of the sequence, on the extreme left of the frame, going to the right beyond landing ingenuity !
Lots of activities in the thin martian air. Be careful, Ingenuity !
QUOTE (erwan @ May 8 2021, 12:23 PM)
Andreas, thank you for your movie. I see a dust devil near the end of the sequence, on the extreme left of the frame, going to the right beyond landing ingenuity !
Yes, I thought I saw one, too, and now it is two of us
 .
.Here it is, above the dusty plain in the background, right behind Ingenuity:

Here is my take on this MCZ-R video, speed x2.

I also made a second video with speed x4 and contrast increased to make the dust devil more visible, but it's still faint:

And finally, the video taken by MCZ-L at 110mm focal length (maximum zoom), speed x3. We see the little bounce at landing and blades rotation speed decreasing until they stop:

I also made a second video with speed x4 and contrast increased to make the dust devil more visible, but it's still faint:
And finally, the video taken by MCZ-L at 110mm focal length (maximum zoom), speed x3. We see the little bounce at landing and blades rotation speed decreasing until they stop:
Looks great. The faster playback and higher contrast definitely helps. In the video sped up 4x I think one can also see dust kicked up when Ingenuity is still a little tilted and approaching the target.
Here a little longer, sped up version as the dust devil progresses: http://mars2020-flight5.surge.sh/ZR0_0076_...50J01_fast.webp
Here a little longer, sped up version as the dust devil progresses: http://mars2020-flight5.surge.sh/ZR0_0076_...50J01_fast.webp
The complete sequence of MCZ-R pictures of Ingenuity 5th flight has arrived: it shows a beautiful dust devil moving before Ingenuity arrives in the FOV.
Here is a video with speed x4 and contrast increased. We can sometimes see the rotation of the dust devil mentioned before!

Here is a video with speed x4 and contrast increased. We can sometimes see the rotation of the dust devil mentioned before!
Spotted by supercam:

The two SuperCam/RMI pictures stitched together (vignetting and color corrected).

https://mars.nasa.gov/technology/helicopter...s-sixth-flight/
Plans for the next flight are described here. Also there is a new helicopter image from Flight 5, linked to in the article. It's very bland but shows lots of detail if you crank up the contrast.
Phil
Click to view attachment
Plans for the next flight are described here. Also there is a new helicopter image from Flight 5, linked to in the article. It's very bland but shows lots of detail if you crank up the contrast.
Phil
Click to view attachment
QUOTE (neo56 @ May 13 2021, 08:19 PM)
The complete sequence of MCZ-R pictures of Ingenuity 5th flight has arrived: it shows a beautiful dust devil moving before Ingenuity arrives in the FOV.
Here is a video with speed x4 and contrast increased. We can sometimes see the rotation of the dust devil mentioned before!
Here is a video with speed x4 and contrast increased. We can sometimes see the rotation of the dust devil mentioned before!
Those are really GREAT videos, seeing also the dust swirling ! Thank you Thomas
I see *three* dust devils in that video: the obvious one at the beginning, one that starts to the left as the copter is landing, and another one between those two in both time and position (starting roughly behind where the copter will land, about 4 seconds into the video).
Thanks Olivier 
Here is my take on the latest RTE picture from Ingenuity, on 5th flight. Distorsion corrected and contrast stretched.
The timing of flights, at 12:30 pm, is optimal for low winds conditions but not for lighting since there are really small shadows.
It's hard to relief of the surface.
Here is my take on the latest RTE picture from Ingenuity, on 5th flight. Distorsion corrected and contrast stretched.
The timing of flights, at 12:30 pm, is optimal for low winds conditions but not for lighting since there are really small shadows.
It's hard to relief of the surface.
I hope the 6th flight goes well--possibly today.
Flights seem to have horizontal traverses at a fixed height of 5 or 10 m. I assume this this keeps the navigation images at a similar scale so it can find landmarks easily. For a future recognizance flight, and to see a significantly larger area, it would be great if Ingenuity went up to 30 m or even 100 m. Would the hight change in image scale confuse the navigation software? Are there other reasons that would preclude pushing the envelope as far as height (other than length of flight for motor heating issues)? Wind? I hope before the end of August Ingenuity hits 200 m vertically with a 360 panorama!!!
Flights seem to have horizontal traverses at a fixed height of 5 or 10 m. I assume this this keeps the navigation images at a similar scale so it can find landmarks easily. For a future recognizance flight, and to see a significantly larger area, it would be great if Ingenuity went up to 30 m or even 100 m. Would the hight change in image scale confuse the navigation software? Are there other reasons that would preclude pushing the envelope as far as height (other than length of flight for motor heating issues)? Wind? I hope before the end of August Ingenuity hits 200 m vertically with a 360 panorama!!!
QUOTE (Floyd @ May 26 2021, 06:06 AM)
I hope the 6th flight goes well--possibly today.
Flights seem to have horizontal traverses at a fixed height of 5 or 10 m. I assume this this keeps the navigation images at a similar scale so it can find landmarks easily. For a future recognizance flight, and to see a significantly larger area, it would be great if Ingenuity went up to 30 m or even 100 m. Would the hight change in image scale confuse the navigation software? Are there other reasons that would preclude pushing the envelope as far as height (other than length of flight for motor heating issues)? Wind? I hope before the end of August Ingenuity hits 200 m vertically with a 360 panorama!!!
Flights seem to have horizontal traverses at a fixed height of 5 or 10 m. I assume this this keeps the navigation images at a similar scale so it can find landmarks easily. For a future recognizance flight, and to see a significantly larger area, it would be great if Ingenuity went up to 30 m or even 100 m. Would the hight change in image scale confuse the navigation software? Are there other reasons that would preclude pushing the envelope as far as height (other than length of flight for motor heating issues)? Wind? I hope before the end of August Ingenuity hits 200 m vertically with a 360 panorama!!!
I'm pretty certain I watched the engineers on the team say that the limiting factor on altitude was the laser altimeter which was built for lower altitudes. I'm sure its weight was a contributing factor in its design.
QUOTE (Floyd @ May 26 2021, 06:06 AM)
Would the hight change in image scale confuse the navigation software?
At altitude you may see fewer high contrast high frequency details for the downward facing navcam to lock on to. Moreover - at higher altitude, your spatial resolution is lower and thus so is the resolution with which you can measure horizontal motion.
The LIDAR is good to ~40m ( https://www.sparkfun.com/products/14032 ) and they may want to leave plenty of margin for that.
That said - yeah - I hope they pump the altitude up as well
Thanks Doug for the LIDAR link: $129 from Garmin.
The LIDAR-Lite v3, a compact optical distance measurement sensor from Garmin. When space and weight requirements are tight, the LIDAR-Lite v3 soars. The LIDAR-Lite v3 is the ideal solution for drone, robot or unmanned vehicle applications.
This easy-to-use 40-meter laser-based optical ranging sensor has all the core features that made the LIDAR-Lite v2 so popular. Small in form and light in weight with low power consumption of less than 130mA during an acquisition. And its user-configurable so you can adjust between accuracy, operating range and measurement time.
Happens to work well for one Mars helicopter...
Doug, I'm glad you are with me in in hoping they pump the altitude.
The LIDAR-Lite v3, a compact optical distance measurement sensor from Garmin. When space and weight requirements are tight, the LIDAR-Lite v3 soars. The LIDAR-Lite v3 is the ideal solution for drone, robot or unmanned vehicle applications.
This easy-to-use 40-meter laser-based optical ranging sensor has all the core features that made the LIDAR-Lite v2 so popular. Small in form and light in weight with low power consumption of less than 130mA during an acquisition. And its user-configurable so you can adjust between accuracy, operating range and measurement time.
Happens to work well for one Mars helicopter...
Doug, I'm glad you are with me in in hoping they pump the altitude.
Am I dreaming? No, I don't think so. Charborob's sol 92 panorama in the other thread shows Ingenuity in a completely different position than in the images post-flight 5. The 6th flight must have occurred before that panorama was taken. Parallax due to the rover moving would be nowhere near enough to produce the change. But no word on it from the mission.
Phil
Phil
Sol 76 and sol 92 comparison. Ingenuity has moved from its flight 5 location. Parallax moves rocks a bit but Ingenuity should be just about in the middle of the sol 92 image.
(EDIT: I mean it should be there if it had not moved)
Phil
Click to view attachment
(EDIT: I mean it should be there if it had not moved)
Phil
Click to view attachment
This is the frame:
https://mars.nasa.gov/mars2020-raw-images/p...0_1100LUJ01.png
It has azimuth of 223 degrees (from roverpics, presumably referring to the center). The helicopter is just right (to N) of center.
The sol93 Navcam series also has Ingenuity (in the same position as on sol92) catching morning light on its reflective body:
https://mars.nasa.gov/mars2020-raw-images/p...9_00_0LLJ01.png
The azimuth is 228 degrees. The helicopter is left (to S) of center. This is consistent with the azimuth from the Zcam image.
So the helicopter azimuth is between 223 and 228 degrees, closer to 223, perhaps 224-225 degrees. It is time to plot that azimuth on a map.
https://mars.nasa.gov/mars2020-raw-images/p...0_1100LUJ01.png
It has azimuth of 223 degrees (from roverpics, presumably referring to the center). The helicopter is just right (to N) of center.
The sol93 Navcam series also has Ingenuity (in the same position as on sol92) catching morning light on its reflective body:
https://mars.nasa.gov/mars2020-raw-images/p...9_00_0LLJ01.png
The azimuth is 228 degrees. The helicopter is left (to S) of center. This is consistent with the azimuth from the Zcam image.
So the helicopter azimuth is between 223 and 228 degrees, closer to 223, perhaps 224-225 degrees. It is time to plot that azimuth on a map.
The black line is an azimuth of 224 degrees, from the the current rover position:
Click to view attachment
I also took Phils nice demonstration that the helicopter rmust have moved for a size comparison to judge relative distance. The imaged, vertical size is now half to a third of what is was on sol76. So the rover is much further away, perhaps towards the end of the black azimuth line. There is a nice smooth area which seems suitable.
Click to view attachment
I need to stare longer at the panorama and the map to find landmarks.
Click to view attachment
I also took Phils nice demonstration that the helicopter rmust have moved for a size comparison to judge relative distance. The imaged, vertical size is now half to a third of what is was on sol76. So the rover is much further away, perhaps towards the end of the black azimuth line. There is a nice smooth area which seems suitable.
Click to view attachment
I need to stare longer at the panorama and the map to find landmarks.
QUOTE (centsworth_II @ May 27 2021, 11:36 AM)
Interesting read!
QUOTE
Approximately 54 seconds into the flight, a glitch occurred in the pipeline of images being delivered by the navigation camera. This glitch caused a single image to be lost, but more importantly, it resulted in all later navigation images being delivered with inaccurate timestamps. From this point on, each time the navigation algorithm performed a correction based on a navigation image, it was operating on the basis of incorrect information about when the image was taken. The resulting inconsistencies significantly degraded the information used to fly the helicopter, leading to estimates being constantly corrected to account for phantom errors. Large oscillations ensued.
Despite encountering this anomaly, Ingenuity was able to maintain flight and land safely on the surface within approximately 16 feet (5 meters) of the intended landing location. One reason it was able to do so is the considerable effort that has gone into ensuring that the helicopters flight control system has ample stability margin: We designed Ingenuity to tolerate significant errors without becoming unstable, including errors in timing. This built-in margin was not fully needed in Ingenuitys previous flights, because the vehicles behavior was in-family with our expectations, but this margin came to the rescue in Flight Six.
Despite encountering this anomaly, Ingenuity was able to maintain flight and land safely on the surface within approximately 16 feet (5 meters) of the intended landing location. One reason it was able to do so is the considerable effort that has gone into ensuring that the helicopters flight control system has ample stability margin: We designed Ingenuity to tolerate significant errors without becoming unstable, including errors in timing. This built-in margin was not fully needed in Ingenuitys previous flights, because the vehicles behavior was in-family with our expectations, but this margin came to the rescue in Flight Six.
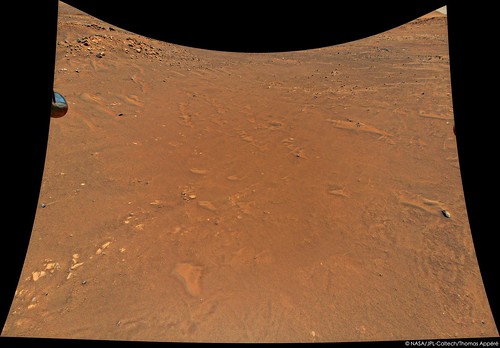
https://mars.nasa.gov/resources/25943/ingenuity-looks-west/
has the full resolution, color Ingenuity aerial image. I think I could locate the foreground on the map. Judging from the horizon, it looks like picture was taken while Ingenuity was tilted back, perhaps during fighting the anomaly, looking southwest. The inferred position of Ingenuity when taking the picture looks like it is a bit north of the black azimuth line. This is an area of small, triangular dunes. Similar dunes are shown in the first part of the video of the flight's last 29s, and landing.
It is difficult to determine Ingenuities location based on the video. The video has a small crater, and there is a small crater in the vicinity of the potential flight path. But it does not seem to match other landmarks like dunes and rocks. Small ripples and dunes may not show on the HiRISE map.
At about 6s in, there is an about 45 degree counterclockwise rotation of the flight direction. My guess is that corresponds to the planned transition from the 150m SW leg to the 15-20m S leg. Then at 16s there seems to another counterclockwise rotation, about 30 degrees. The video is 21s but shows 29s of flight.
It looks like the originally planned 50m final NE leg may have been modified, perhaps to avoid getting too close to the rim of the larger crater.
has the full resolution, color Ingenuity aerial image. I think I could locate the foreground on the map. Judging from the horizon, it looks like picture was taken while Ingenuity was tilted back, perhaps during fighting the anomaly, looking southwest. The inferred position of Ingenuity when taking the picture looks like it is a bit north of the black azimuth line. This is an area of small, triangular dunes. Similar dunes are shown in the first part of the video of the flight's last 29s, and landing.
It is difficult to determine Ingenuities location based on the video. The video has a small crater, and there is a small crater in the vicinity of the potential flight path. But it does not seem to match other landmarks like dunes and rocks. Small ripples and dunes may not show on the HiRISE map.
At about 6s in, there is an about 45 degree counterclockwise rotation of the flight direction. My guess is that corresponds to the planned transition from the 150m SW leg to the 15-20m S leg. Then at 16s there seems to another counterclockwise rotation, about 30 degrees. The video is 21s but shows 29s of flight.
It looks like the originally planned 50m final NE leg may have been modified, perhaps to avoid getting too close to the rim of the larger crater.
Incredible work by the team! This little chopper just takes everything Mars (or faulty computers!) can throw at it.
First emergency landing on another planet?
First emergency landing on another planet?
Picture taken by Ingenuity during its 6th flight, rectified.

And with sky extended on post-processing:

And with sky extended on post-processing:
Go nuts, people! (like me):
https://mars.nasa.gov/mars2020/multimedia/r..._RTE#raw-images
Raw images from Ingenuity.
Phil
https://mars.nasa.gov/mars2020/multimedia/r..._RTE#raw-images
Raw images from Ingenuity.
Phil
For those who like me waited till now to try to do much with these images : specs from Balaram et al "Mars Helicopter Technology Demonstrator" https://rotorcraft.arc.nasa.gov/Publication...AA2018_0023.pdf ... assuming they haven't changed unless someone has better more recent source (I'm pretty sure these have been posted upthread piecemeal, but it's long).
I'm a little confused about the 47x47 deg values - assuming it's a typo and that refers to the narrower side, since the images aren't square.
QUOTE
• Navigation (NAV) Camera. This is a global-shutter, nadir pointed grayscale 640 by 480 pixel sensor (Omnivision
13OV7251) mounted to a Sunny optics module. It has a field-of-view (FOV) of 133 deg (horizontal) by 100 deg
(vertical) with an average Instantaneous Field-of-view (IFOV) of 3.6 mRad/pixel, and is capable of acquiring
images at 10 frames/sec. Visual features are extracted from the images and tracked from frame to frame to provide
a velocity estimate.
• Return-to-Earth (RTE) Camera. This is a rolling shutter, high-resolution 4208 by 3120 pixel sensor (Sony IMX
214) with a Bayer color filter array mated with an O-film optics module. This camera has a FOV of 47 deg
(horizontal) by 47 deg (vertical) with an average IFOV of 0.26 mRad/pixel.
Both cameras are mounted on the helicopter Lower Sensor Assembly as shown below in Fig. 11. The NAV camera
is pointed directly towards nadir, and the RTE camera is pointed approximately 22 deg below the horizon, resulting in
an overlap region between the two camera image footprints of approximately 30 deg × 47 deg. The overlap allows the
possibility of feature registration between NAV and RTE images during post-flight data processing on Earth.
13OV7251) mounted to a Sunny optics module. It has a field-of-view (FOV) of 133 deg (horizontal) by 100 deg
(vertical) with an average Instantaneous Field-of-view (IFOV) of 3.6 mRad/pixel, and is capable of acquiring
images at 10 frames/sec. Visual features are extracted from the images and tracked from frame to frame to provide
a velocity estimate.
• Return-to-Earth (RTE) Camera. This is a rolling shutter, high-resolution 4208 by 3120 pixel sensor (Sony IMX
214) with a Bayer color filter array mated with an O-film optics module. This camera has a FOV of 47 deg
(horizontal) by 47 deg (vertical) with an average IFOV of 0.26 mRad/pixel.
Both cameras are mounted on the helicopter Lower Sensor Assembly as shown below in Fig. 11. The NAV camera
is pointed directly towards nadir, and the RTE camera is pointed approximately 22 deg below the horizon, resulting in
an overlap region between the two camera image footprints of approximately 30 deg × 47 deg. The overlap allows the
possibility of feature registration between NAV and RTE images during post-flight data processing on Earth.
I'm a little confused about the 47x47 deg values - assuming it's a typo and that refers to the narrower side, since the images aren't square.
I would say that the horizontal FOV of the RTE camera is close to 90 degrees based on seeing two of the landing legs at the edges of the photos and mapping of surface features. Pointing 22 degrees below the horizon should mean that at 10m height the camera is 10m/tan(22degrees), ca. 25m away from the lower edge of the image, if the rotorcraft is in a horizontal position. But there is clearly also some fisheye type warping which would bring the lower edge closer the camera.
QUOTE (Greenish @ May 28 2021, 05:31 PM)
I'm a little confused about the 47x47 deg values - assuming it's a typo and that refers to the narrower side, since the images aren't square.
Assuming the IFOV is correct, the RTE camera is mounted in landscape mode and has an FOV of about 63x46 degrees (62.7x46.5).
Here's a few projections of a stitch of RTE images from Sol 61. And thanks Mike, yes, something around 63 deg for HFOV seems to work OK...
Click to view attachment Click to view attachment Click to view attachment
Click to view attachment Click to view attachment Click to view attachment
This is a "lo-fi" version of our main content. To view the full version with more information, formatting and images, please click here.